Robotic Arm
Arduino
From my drone science class, I worked with an Arduino and became interested in working on an Arduino project during my own time. I came up with the idea to design a robotic arm that would be controlled by 7 servo motors: 1 for each finger, 1 to twist the hand, and 1 to rotate the hand back and forth. I am modeling the arm in SolidWorks and in the future plan to have it 3D printed.
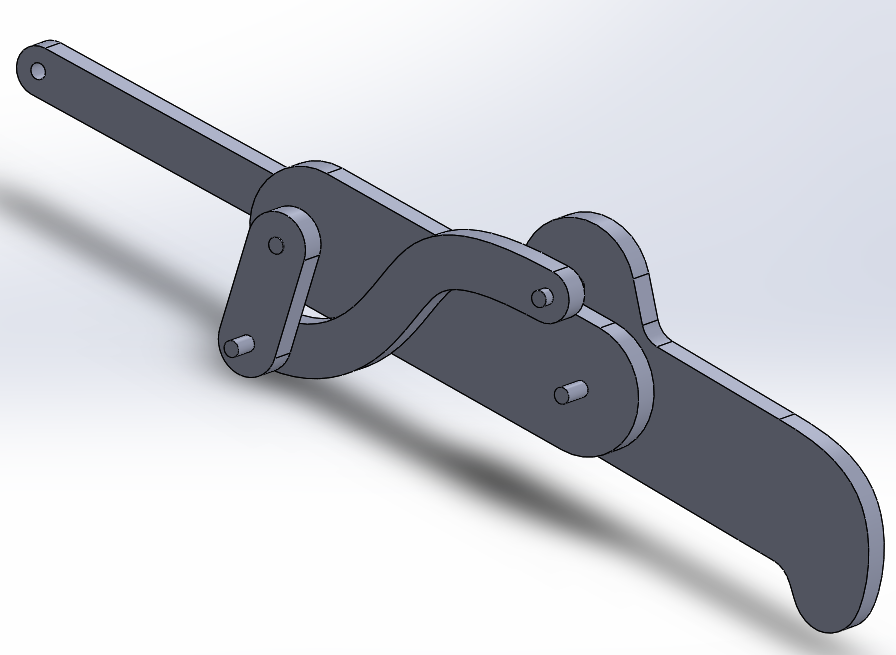
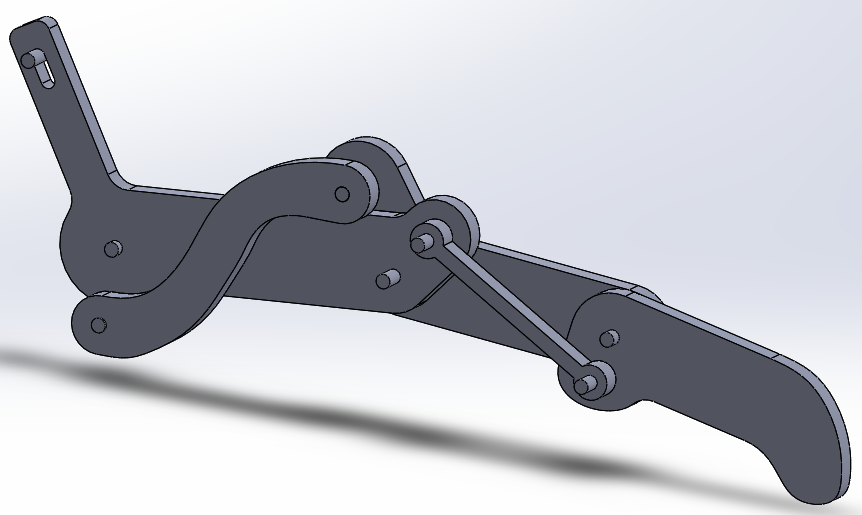
The plan is to use a scotch yoke to convert servo motor rotational motion into linear motion. This linear input would be above the rotation point of the base of a finger, producing a moment. From this single, linear force input, I want the rest of the finger to be able to close up. To achieve this, I have sketched different linkages and positioned the joints in arbitrary locations to produce moments in the appropriate directions.
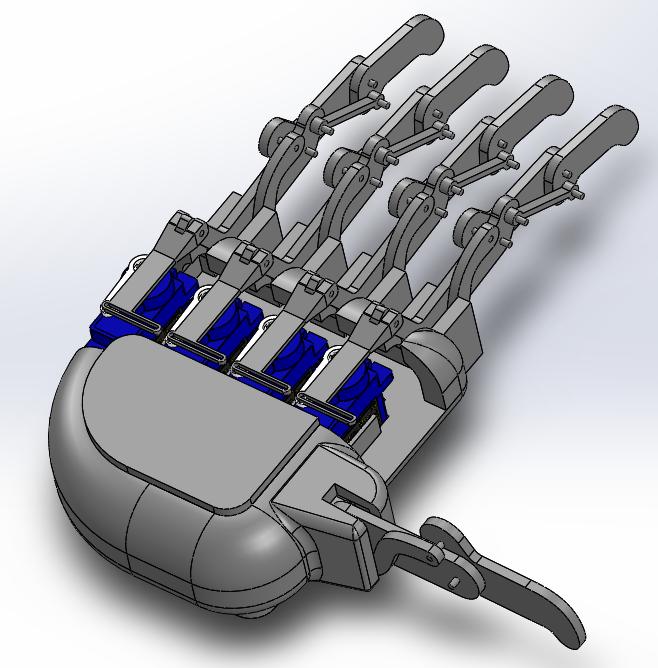
As of January 18, 2021, the current rough draft of the hand is shown on the right. The fingers and scotch yoke have been tweaked, testing different dimensions and positions to create working finger mechanisms while staying relatively close to true scale. After many iterations, the finger joints were arbitrarily positioned to create some curvature and the input arm was put at an angle to minimize the height. The thumb was redesigned to be a parallelogram form crank rocker mechanism which will produce the rotation needed. The scotch yoke was kept for the fingers as the servo width was much smaller than the height. If the servos for fingers were placed on their sides like for the thumb, the hand would end up being very wide.
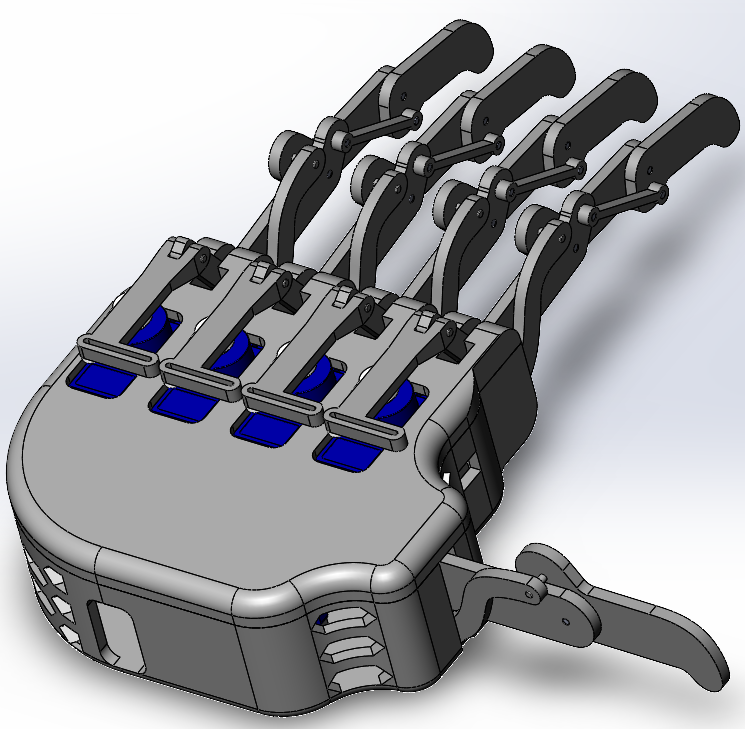
On the left, is the most recent version of the robotic hand. In Fall of 2021, the hand was redesigned for manufacturing and 3D printed using PLA. The hand base and top portion were redesigned from scratch to make assembly easier than the initial design. The hand added cutouts for aesthetic and included snap fittings for easy connection. However, the snap fittings were not accurately printed and are not inlcuded during the testing. A cutout was also included to let the servo wires out of the hand to connect to the Arduino. The hand control is actuated with the use of an IR remote with each button performing different actions depending on the 5 servo motors. The robot hand is functioning except for the thumb due to the difficulty of printing a dimensionally accurate part to have the linkage move as intended. The hand has been put on hold due to lack of time, but plan on resuming to finish the thumb and apply final touches.